
什么是SLAM?
SLAM是同步定位與地圖構(gòu)建(Simultaneous LocalizaTIon And Mapping)的縮寫,最早由Hugh Durrant-Whyte和John J.Leonard提出。
其實,SLAM更像是一個概念而不是一個算法,它本身包含許多步驟,其中的每一個步驟均可以使用不同的算法實現(xiàn)。主要用于解決移動機器人在未知環(huán)境中運行時即時定位與地圖構(gòu)建的問題。
當(dāng)你身處異地,怎么準確找到想去的地方?在戶外迷路時,怎么找到回家的路?沒錯,我們有導(dǎo)航軟件和戶外地圖。
和人類繪制地圖一樣,機器人描述環(huán)境、認識環(huán)境的過程主要就是依靠地圖。它利用環(huán)境地圖來描述其當(dāng)前環(huán)境信息,并隨著使用的算法與傳感器差異采用不同的地圖描述形式
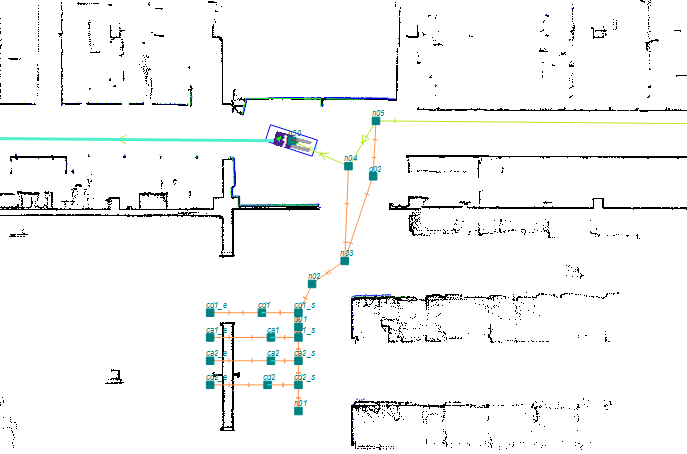
激光傳感器:激光傳感器可以直接獲得相對于環(huán)境的直接距離信息,從而實現(xiàn)直接定位,對于激光傳感器的定位及軌跡優(yōu)化可以通過算法進行判斷,當(dāng)然,內(nèi)面牽扯到很多技術(shù)細節(jié)和算法。SLAM是機器人智能識別的重要提現(xiàn),也是AGV無軌式導(dǎo)航的發(fā)展方向
- 上一條AGV鉛酸電池維護方法
- 下一條售前客戶服務(wù)